PM: “Five hundred feet, stable.”
PF: “Really?”
PM: (Silence)
PF: (Ten seconds later) “Landing.”
If the National Transportation Safety Board (NTSB) had examined the Cockpit Voice Recorder (CVR), those would have been the only words exchanged between the Pilot Monitoring (PM) and Pilot Flying (PF) between 500 ft. Above Ground Level (AGL) and the PM’s first callout once they were on the runway. If the NTSB also looked at the Flight Data Recorder (FDR), they would have noted that the aircraft was fully configured, on extended centerline, on a 3° glide path, on speed, and at 30° of bank.
— James Albright
Updated:
2021-11-15

Of course, the NTSB never looked at this incident because the results were an otherwise uneventful landing. But had an inquiry taken place, investigators would also have noted that both pilots were highly experienced, over 20,000 hours and 70 years of flight experience between them. Both were highly proficient, though only the PF had more than 100 hours in type. The aircraft was less than a year old. In fact, the aircraft, a Gulfstream GVII-G500, had only been type certificated the previous year. Human factors specialists would have also noted that the PF was the flight department’s Director of Aviation, and the PM was the Director of Safety. Oh yes, there is one more pertinent point. I was the PF.
1
We have a problem
I first heard the term “stabilized approach” in 1998, when the Flight Safety Foundation produced their exceptionally well-done Approach and Landing Accident Reduction (ALAR) toolkit. I am sure the concept had been around before that, but this was my introduction to the idea. ALAR Briefing Note 7.1 established a few concepts that changed the way most of us fly:
- Approaches must be stabilized no later than a “minimum stabilization height” of 1,000 feet above airport elevation in instrument meteorological conditions (IMC) or 500 feet above airport elevation in visual meteorological conditions (VMC).
- Any deviations at minimum stabilization height and below should be called out by the PM.
- Any time an approach is not stabilized at the minimum stabilization height or becomes unstabilized below the minimum stabilized height, a go around must be conducted.
The ALAR toolkit also recommended criteria for judging what is and what isn’t considered stabilized. There are nine items on the list, see the sidebar, but I’ve come to think of them as these:
- The aircraft is fully configured, and all checklists are completed.
- The aircraft is on extended centerline and on the correct glide path, with only small changes in heading and pitch needed to maintain the correct flight path.
- The aircraft is on speed, no slower than VREF or faster than VREF+20.
- The aircraft sink rate is no greater than 1,000 feet per minute and the power setting is appropriate for the configuration.
The rationale behind the stabilized approach idea is unquestioned. The ALAR study found that unstabilized approaches were a causal factor in 66 percent of 76 approach and landing accidents and serious incidents worldwide in 1984 through 1997. We, as an industry, have taken notice. The “five hundred feet, stable” callout has become almost automatic. As the recounting of my experience last year already noted, the callout has become automatic even if the approach isn’t necessarily “really?” stable. Is that an isolated incident or is the problem that many of us are not practicing what we preach?
In 2017 the Flight Safety Foundation released a study they conducted with The Presage Group, called the “Go-Around Decision-Making and Execution Project.” Their analysis of accident data between 1994 and 2010 revealed that, “unstable approaches occur on 3.5 to 4.0 percent of all approaches, and 95 to 97 percent of flight crews whose airplanes are in this state continue the approach to landing.” Clearly, very few pilots are following their own standard operating procedures (SOPs) and are not going around from unstable approaches.
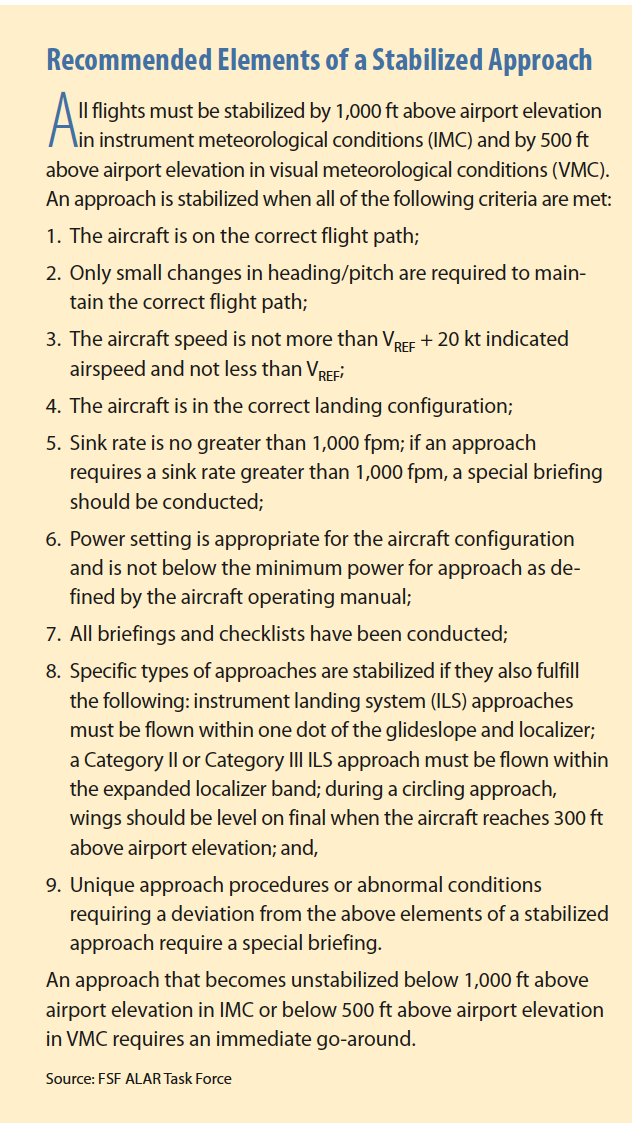
Recommended elements of a stabilized approach, FSF ALAR 7.1
2
Why?
If 95 to 97 percent of flight crews are failing to go around when their SOPs tell them to, we have a problem with the crews, the SOPs, or both. Too many of us find ourselves in unstable approaches and believe, “I can save this.” The fact that we almost always do, reinforces our decision to deviate from our stable approach rules. The 2017 Flight Safety Study explored the human factors behind our noncompliance; some of these may apply to you.
Passenger or company complaints.
Some pilots may fear the consequences of going around from an approach in the form of passenger complaints or questions from their employers. I think this might be true for some, but for most of us in business aviation it may be truer to say we have a fear of letting our passengers down. In the last several years I’ve gone missed approach for weather twice and a third time because it appeared the winds would be too gusty to handle. In each of these cases if we got any questions at all, the passengers expressed their appreciation for us keeping them safe.

N279AJ Wreckage, right side, from NTSB Accident Docket CEN09LA116.
Lack of crew support.
Another cited reason is fear the rest of the crew will not be supportive. I’ve never seen this personally but there are several accident case studies that bear this out. This dynamic can be especially problematic for business aviation crews, where the more senior pilot could be in the PM role.
On January 3, 2009, a crew flying a Learjet 45XR without passengers to Telluride Regional Airport (KTEX), Colorado, did manage to go missed approach when called for. The PM in the right seat was also the Pilot in Command. After going missed approach a second time, the PM said, “I mean we could almost circle and do it. Wanna try?” The PF said, “I don’t,” and then sighed, realizing the PIC would insist that they do. They didn’t make it. Both pilots survived but the aircraft was destroyed.
SOP credibility.
I think this type of pilot versus pilot pressure is rare, thankfully. I believe the primary reason behind the failure of most pilots to go around from unstable approaches is that we don’t really believe the stable approach rules are credible.
When I failed to go around because I was still in a bank rolling out on final, I knew I would be completely stable at 400 ft., a hundred feet below our company’s stabilized approach height criteria. Guilty? Yes. But something inside me justified my actions because that inner voice told me I could. One dot high on glidepath during an instrument approach at 1,000 ft.? Been there. But I had the glide slope needle centered shortly thereafter. I am not alone in this, and when I am in the right seat I do speak up. But I also understand the PF will almost always take care of it. In the last five years I’ve only had to say “go around” for an unstable approach once. The PF had such an excessive descent rate going I was certain it could not be salvaged. As the flight department manager, I signed off on our SOPs and each of our pilots agreed to them. But we have failed to live up to them.
Target fixation.
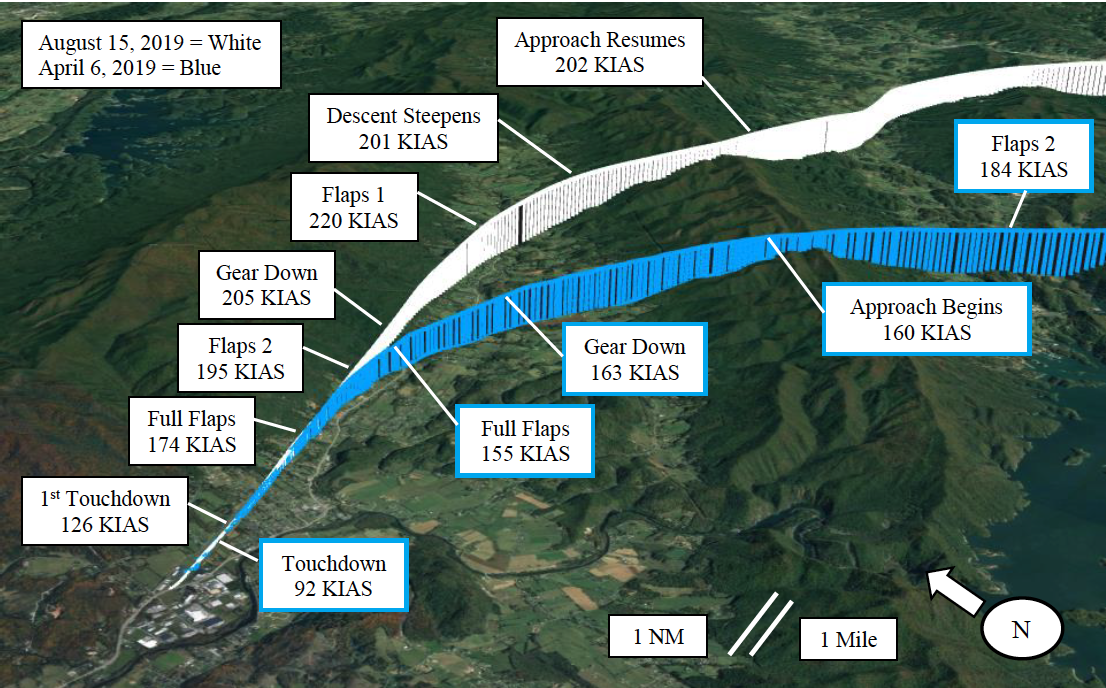
A comparison of a stable (blue) and unstable (white) approach into Elizabethton
We pilots tend to have “can do” personalities and despite our best intentions, there are times our goals can blind us to the dangers we face. Here again, we in business aviation have added challenges. Our destinations are quite often new to us. The process of landing is complicated by the task of having to find an unfamiliar airport.
On August 15, 2019, a crew flying a Citation Latitude crashed at Elizabethton Municipal Airport (OA9), Tennessee, following an approach that included flight at the maximum allowed gear and flap speeds, descent rates of 1,500 feet per minute, and a touchdown that was 18 knots too fast. At one point the PF/SIC asked the PM/PIC, “Do I need to go around?” The PM/PIC’s answer was, “No.” It is clear from videos of the aftermath that the occupants were lucky to have survived. During a post-accident interview, the PM/PIC was asked if he thought the approach was stabilized; he said no. It appears that when consumed by the task of approach and landing, pilots can fixate on the goal at the expense of SOPs. We “lock” onto our target until getting to the target.
Not prepared to go around when the time comes.

Southwest Airlines 1455, Burbank Airport, CA, March 5, 2000
A final issue that seems to vex us in the heat of the moment is that we are not mentally prepared to switch from “I am landing an airplane” mode to “I am going around” mode. The mental horsepower needed to fly an approach to landing is obviously considerable, even on a low-pressure, routine flight. If things become tense, switching from “I am landing” to “I am going around” suddenly can be almost impossible if we don’t prepare ourselves for the possibility.
On March 5, 2000, a crew flying a Southwest Airlines Boeing 737 to Burbank Airport (KBUR), California, was set up by air traffic control with the proverbial “slam dunk” approach. They were held up high and asked to keep a higher-than-normal speed until late in the approach. Despite very robust stabilized approach SOPs, the crew fixated on the task at hand and never considered going around. The first officer remembers hearing the Ground Proximity Warning System “sink rate” and “pull up” calls, but believed the captain was correcting. The airplane touched down at 182 knots after consuming 3,000 feet of runway in the flare. While all on board survived, the aircraft was destroyed.
3
The solution that has gone unnoticed (by many)
Most of us pilots do not view our current stabilized approach criteria as credible. We think we can save approaches that are unstable as judged by these criteria. And we are not mentally prepared to go around from unstable approaches by the time the need becomes apparent. But perhaps even more alarming than all that, many of us seemed resigned to this state of affairs.
I was resigned to the way we’ve always done it too, until my eyes were opened during a talk given at the 2021 NBAA Business Aviation Convention & Exhibition. Charlie Precourt, retired space shuttle pilot and current Citation Jet Pilots Association Safety Committee Chairman, outlined the problem and unveiled a solution that seemed to reinvent the idea of how to evaluate a stabilized approach. I told him it was the solution I had been looking for all these years. He modestly told me it had all been laid out by the 2017 Flight Safety Foundation Go-Around Decision-Making and Execution Project. I read that report years ago but apparently tuned it out as just another explanation of the same old solution. Precourt’s dynamic presentation gave life to the 54-page report and will forever change the way I fly airplanes. He cautioned me that the method should be tailored to aircraft type. I’ve done that for my Gulfstream GVII, but I believe this method should work for any business jet. I think it will also work for smaller and larger aircraft but encourage you to read the 2017 report for yourself.
Step 1: Apply three approach gates
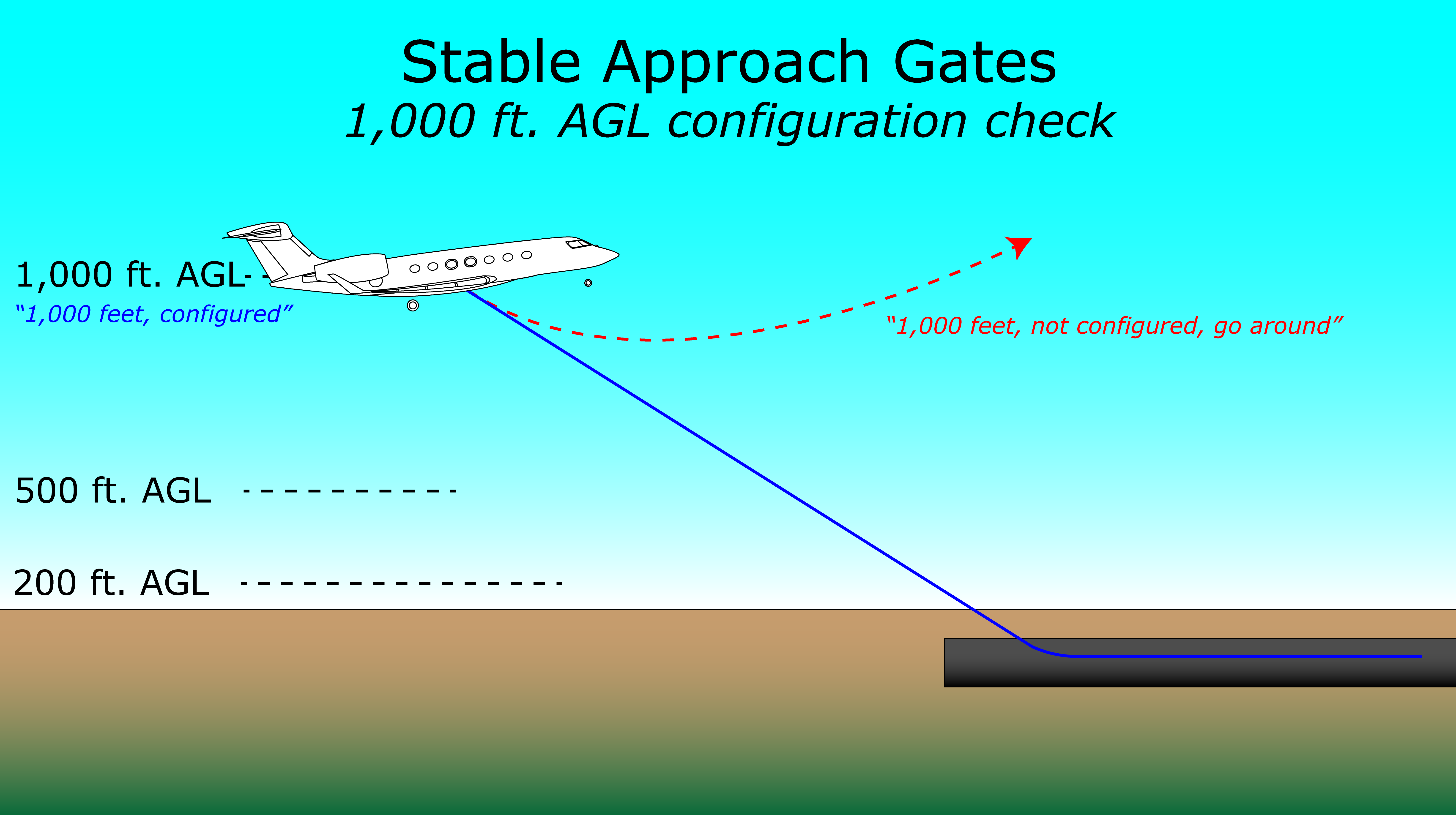
Stable approach gates configuration check examples
One of the problems with the previous rationale of a stabilization height of either 1,000 ft. IMC or 500 ft. VMC, below which a go around must be executed, is that many pilots do not believe an approach is “beyond saving” at that point. The “do or die” status of those heights became non-credible. The newer methodology establishes three approach gates where different items are evaluated, crew interaction is increased, and the point at which a go around must be initiated is lowered. You can (and should) go around earlier if the need arises, but the “must” point is lower.
- Configuration Gate, conducted between 800 and 1,500 ft. I’ve selected 1,000 ft. This is the point at which the final configuration of the aircraft (i.e., gear and flaps) must have been selected. This is done earliest since it takes time for the landing gear and flaps to move, and we quite often cannot decelerate to our final approach speed until the last notch of flaps is extended. The study says most aircraft can only slow between 10 to 20 kts. per nautical mile, so 1,000 ft. might be too low for some, but it looks right for my aircraft. At this point the callout would be, “1,000 ft., configured.” The study does not mandate a go around at this point if not configured, but I think that would be my choice.
- 500 ft. gate. This gate is used to check all stable approach criteria. The criteria should be delineated in company SOPs. See the sidebar, “The recommended elements of a stabilized” for an example list.
- 200 ft. gate. The study uses a 300 ft. gate, but we’ve opted for 200 ft. to coincide with typical ILS minimums. (We regularly practice missed approaches from this height.) This gate differentiates between approach stability and a go-around decision. The study strongly recommends a go around be executed if the approach is unstable at this point.
There is much more to this technique than replacing one gate with three. If you are not stable below the 1,000 ft. and 500 ft. gates, a go around is not mandated. Instead, the PM starts a “play-by-play” callout of what is wrong, reminding the PF that something needs to change if the approach is to continue.
Step 2: Use callouts throughout to confirm the approach is stable or to warn that it is not
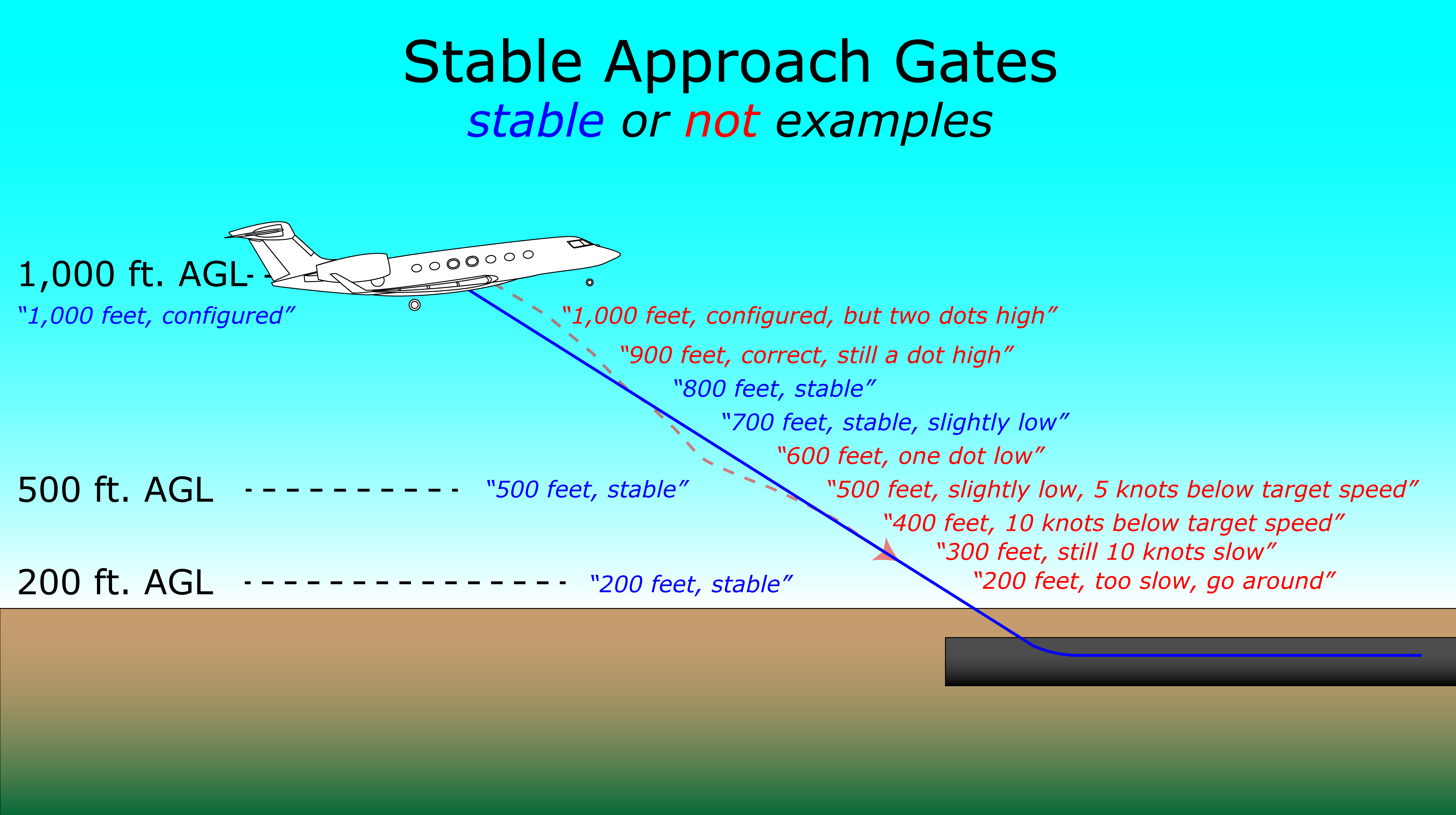
The three approach gates, examples of stable and unstable approaches
If the approach begins and remains stable, the PM calls out that fact at 1,000 ft., 500 ft., and 200 ft. Otherwise, passing 1,000 ft. AGL, the PM starts to callout what is wrong every hundred feet until a 200-ft. limit point. The study doesn’t specify every 100 feet but given that you descend through 100 feet every ten seconds on a 600 foot per minute approach, it seems about right to me. (It takes a second to make the callout.) The callouts are necessary even when everything is stable because the crew should be practiced at making the calls. I long ago grew accustomed to complete silence in the cockpit once the aircraft was configured, and only grudgingly accepted the bare minimum of altitude callouts. But over the years, watching the normalization of unstable approaches, I see the value in a good play-by-play.
Let’s say everything is just as it should be. You can expect a “configured” call at 1,000 ft., and two “stable” calls at 500 and 200 ft. AGL. But now let’s say you start too high on glide path, correct but overcorrect and end up too low. Then, just as you reach 500 ft. you manage to correct back to glide path but start losing speed. The play-by-play lets you know things are not going smoothly well in advance. If you get to the 200 feet point and things are back to normal, you land. But if they aren’t, the “go around” call will not be a surprise.
Step 3: Use a limit altitude to point out when a go-around decision must be made
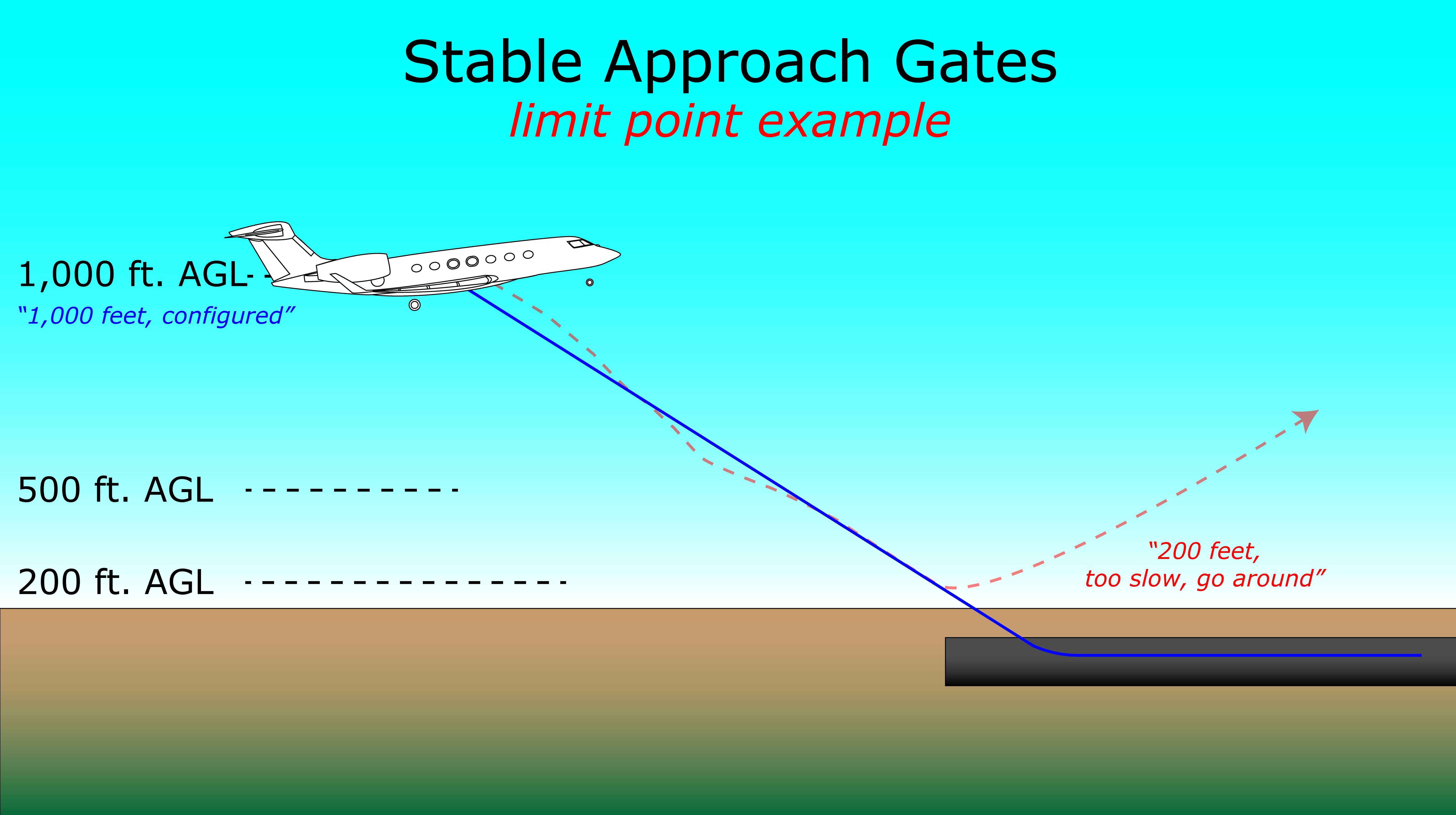
The limit point
Before every safety officer in the country assails me for advocating there is no need to go around until just 200 ft. above the runway, allow me to emphasize the 200 ft. gate is a limit. There are times a go around should be initiated even before the 1,000 ft. gate. The Burbank Southwest Airlines flight, for example, crossed 1,000 ft. more than 50 knots too fast with less than their final flap setting because they were faster than the flap limiting speed. They were descending three times the stable approach limit, their throttles were at idle, and the GPWS repeatedly announced “SINK RATE” and “PULL UP.” Looking at their approach profile from the safety and comfort of an armchair, as armchair quarterbacks are wont to do, they should have gone around at 3,000 ft. If you do, however, insist that every violation of stable approach criterion be treated with a go around, consider the risk of an unplanned go around into a busy traffic pattern because the aircraft was 10 knots fast or still rolling out of a bank at 500 feet. Clearly, not all unstable approaches are created equally.
As is true with the conventional 1,000-ft. / 500-ft. methodology, there comes a time when the callouts come to an end, provided the landing is deemed stable enough to land. But that doesn’t mean the need for a go around comes to an end. When designing your stable approach SOP, you should keep in mind that the risks associated with a go around go up as the altitude goes down. I am comfortable with the 200 ft. limit gate, but I’ve heard other operators use higher and lower heights. Whether or not you opt for a lower height, you should consider the risks associated with having to outclimb nearby obstacles from a lower altitude, the problems associated with engine spool-up time, and the ability of your aircraft to overcome the challenges of climbing out of ground effect. For more about the problems with these types of go arounds, see Balked Landings.
4
Flight department buy-in
The biggest advantage to this three-step method is that it more realistically tracks pilot expectations and is therefore more credible. If you plan on adopting a form of this technique, you should fully discuss it amongst all pilots in your group to obtain genuine “buy in.” As the study makes clear, the SOP can only be effective when it is “written clearly, explained thoroughly, commonly understood, and voluntarily complied with.”
So, is this just another attempt at making stable approaches palatable by gently massaging the procedures and callouts? I don’t think so. The play-by-play perfectly addresses my biggest weakness when it comes to stable approaches. It reminds me early that the other pilot is watching and reporting for us both (and the CVR) how things are going. It should spur me into not accepting my performance as “close enough.” It addresses that inner voice that says to me, “I can save this.” And if I don’t, it steels the PM’s nerves to say “go around” while preparing me to receive those instructions and act on them. The NTSB has never reviewed the CVR and FDR on any of my flights. This technique will help me stop them from ever having to.
References
(Source material)
Flight Safety Foundation Approach and Landing Accident Reduction (ALAR) Tool Kit, Briefing Note 7.1, Stabilized Approach, Alexandria, VA, 2009
Flight Safety Foundation Final Report, Go-Around Decision-Making and Execution Project, March 2017